#include <stdio.h>#include <signal.h>#include <stdlib.h>#include <sys/wait.h>#include <string.h>#include <unistd.h>#include "scan345.h"#include "marcmd.h"#include "marglobals.h"#include "mararrays.h"#include "esd.h"#include "marhw.h"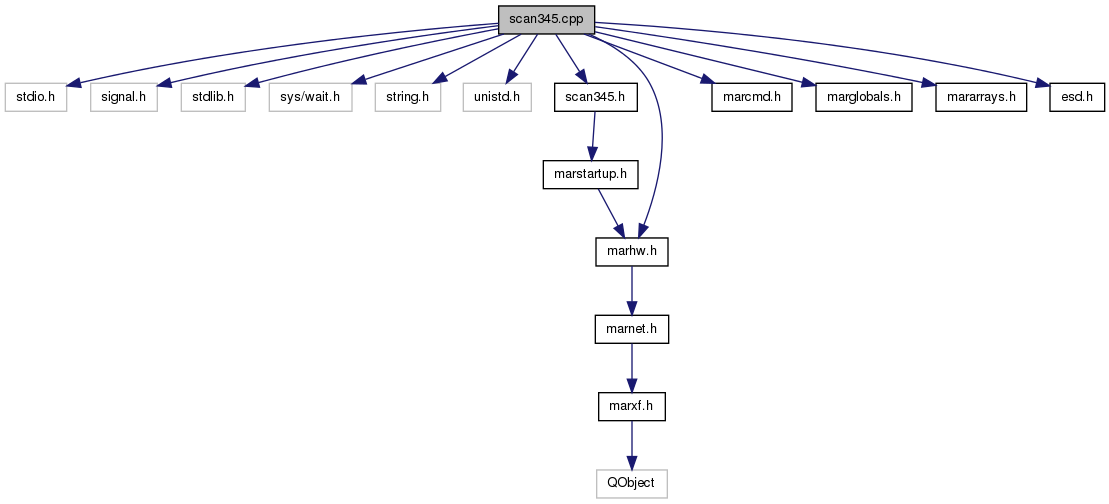
Go to the source code of this file.
Defines | |
| #define | MAR_GLOBAL |
Variables | |
| int | timeout = 0 |
| int | input_offset = -999999 |
| float | input_scale = -1.0 |
| int | input_priority = -1 |
| int | status_interval = 0 |
| char | do_xform = 0 |
| char | input_keep_spiral = 0 |
| char | input_keep_image = 1 |
| char | input_skip_op = 0 |
| char | skip_selftest = 1 |
| char | no_xform = 0 |
| static char | mar_continue = 0 |
Define Documentation
| #define MAR_GLOBAL |
Definition at line 32 of file scan345.cpp.
Variable Documentation
| char do_xform = 0 |
Definition at line 49 of file scan345.cpp.
Referenced by MarXF::mar_start_scan_readout(), MarXF::output_header(), MarXF::output_image(), and MarXF::Transform().
| char input_keep_image = 1 |
Definition at line 52 of file scan345.cpp.
Referenced by MarHW::marTask(), and Scan345::scan345_main().
| char input_keep_spiral = 0 |
Definition at line 51 of file scan345.cpp.
Referenced by MarHW::marTask(), and Scan345::scan345_main().
| int input_offset = -999999 |
Definition at line 45 of file scan345.cpp.
Referenced by Scan345::scan345_main().
| int input_priority = -1 |
Definition at line 47 of file scan345.cpp.
Referenced by GetConfig(), MarStartup::marStartup(), and Scan345::scan345_main().
| float input_scale = -1.0 |
Definition at line 46 of file scan345.cpp.
Referenced by MarStartup::marStartup(), and Scan345::scan345_main().
| char input_skip_op = 0 |
Definition at line 53 of file scan345.cpp.
Referenced by MarXF::output_image(), MarXF::PrintResults(), and Scan345::scan345_main().
char mar_continue = 0 [static] |
Definition at line 61 of file scan345.cpp.
Referenced by Scan345::mar_sig().
| char no_xform = 0 |
Definition at line 55 of file scan345.cpp.
Referenced by Scan345::scan345_main().
| char skip_selftest = 1 |
Definition at line 54 of file scan345.cpp.
Referenced by Scan345::scan345_main().
| int status_interval = 0 |
Definition at line 48 of file scan345.cpp.
Referenced by MarHW::get_status(), GetConfig(), and PutConfig().
| int timeout = 0 |
Definition at line 44 of file scan345.cpp.
Referenced by QScan345Controller::QScan345Controller().
